Appearance
第17章 设计模式与架构决策
"运行时系统和框架的根本分歧在于:谁拥有 main 函数。框架说'你来调用我',运行时说'我来调用你'。这一个控制反转,决定了安全能否集中执行、会话能否跨请求持久、配置能否零停机热更新。"
本章要点
- 提炼 OpenClaw 中反复出现的七大设计模式:适配器、中间件管线、分层覆盖等
- 理解"运行时 vs. 框架"这一最关键的架构决策及其深远影响
- 掌握 Token 预算感知设计与推送式编排模式
- 通过六维框架对比,建立 Agent 系统架构的全局视野
17.1 为什么这一章重要
如果前面十六章是"拆开钟表,审视每一个齿轮",那本章就是"退后三步,看整座钟表为什么能精确走时"。
好的架构师不是记住了更多的组件,而是识别出了更深层的模式。棋手不是记住了更多棋局,而是看到了棋子之间的力学。
关键概念:设计模式(Design Patterns) 设计模式是在特定上下文中反复出现的问题及其解决方案的提炼。OpenClaw 代码库中有七个反复出现的核心模式:适配器(驾驭异构性)、中间件管线(链式处理)、分层覆盖(配置灵活性)、快照与不可变性(并发安全)、推送式编排(避免轮询)、Token 预算感知(资源管理)和约定式发现(降低配置负担)。
我们不再聚焦于任何特定模块,而是提升到模式层面:哪些设计在 OpenClaw 代码库中反复出现?每个解决哪类问题?其他框架——LangChain、AutoGPT、CrewAI、Semantic Kernel、Dify——面对相同问题时做了什么不同选择?
这是全书最可迁移的一章。即使你从不使用 OpenClaw,这里提炼的模式和权衡,适用于你构建的任何 AI Agent 系统。模块会过时,框架会更替,但模式和思维方式会陪伴你整个职业生涯。
🔥 深度洞察:模式是压缩后的经验——设计的"基因组"
为什么设计模式比任何具体实现都更持久?答案来自信息论与进化生物学的交叉点。基因组不编码具体的蛋白质形状,它编码的是"如何在特定环境中制造蛋白质"的规则。同样,设计模式不编码具体的代码,它编码的是"如何在特定约束下做出权衡"的智慧。LangChain v0.1 和 v0.2 的 API 完全不同,但它们背后的适配器模式完全相同。OpenClaw 的代码可能在三年后面目全非,但"用函数式适配器而非类层次结构来驾驭异构性"这个洞察,在你遇到下一个异构系统时依然适用。好的架构师不是收集具体方案的人——而是积累可迁移的判断力的人。 这一章的价值,不在于你记住了 OpenClaw 的七个模式,而在于你下次面对新系统时,能自己识别出第八个。
📖 历史小故事:适配器模式的意外起源
设计模式的概念并非来自计算机科学——它来自建筑学。1977 年,建筑师 Christopher Alexander 出版了《A Pattern Language》,记录了 253 种建筑和城市设计中反复出现的解决方案。十六年后,1994 年,四位软件工程师(Erich Gamma、Richard Helm、Ralph Johnson、John Vlissides,被称为 "Gang of Four")读了 Alexander 的书,灵光一闪:软件设计中也有类似的重复模式! 他们的《Design Patterns》一书从此改变了软件工程的面貌。其中"适配器模式"的灵感直接来自现实世界——你带着美式插头去欧洲旅行时用的电源转换器,就是适配器的完美实例。OpenClaw 的 Provider 层扮演的正是这个角色:LLM 世界的"万能电源转换器",让任何"电器"(Agent 逻辑)都能插入任何"插座"(模型 API)。有趣的是,Alexander 本人后来对软件设计模式的发展方向颇有微词——他认为软件工程师过于关注模式的形式结构,而忽略了模式背后的"生活品质"。这个批评在今天读来依然振聋发聩:好的设计模式不是因为"它是一个模式"而值得使用,而是因为它真正改善了系统的某个品质——可维护性、可理解性、安全性。
17.2 适配器模式:驾驭异构性
17.2.1 问题的本质
OpenClaw 运行在一个极度异构的生态系统中:数十个 LLM 提供商,每个有不同的 API 格式、认证方式和能力特征;数十个通道,每个有不同的消息格式、媒体支持和速率限制;跨版本的工具定义格式,需要向前和向后兼容。
如果每个组合都需要专门的代码,复杂度将是 O(提供商数 × 通道数 × 工具格式数)——一个不可维护的组合爆炸。
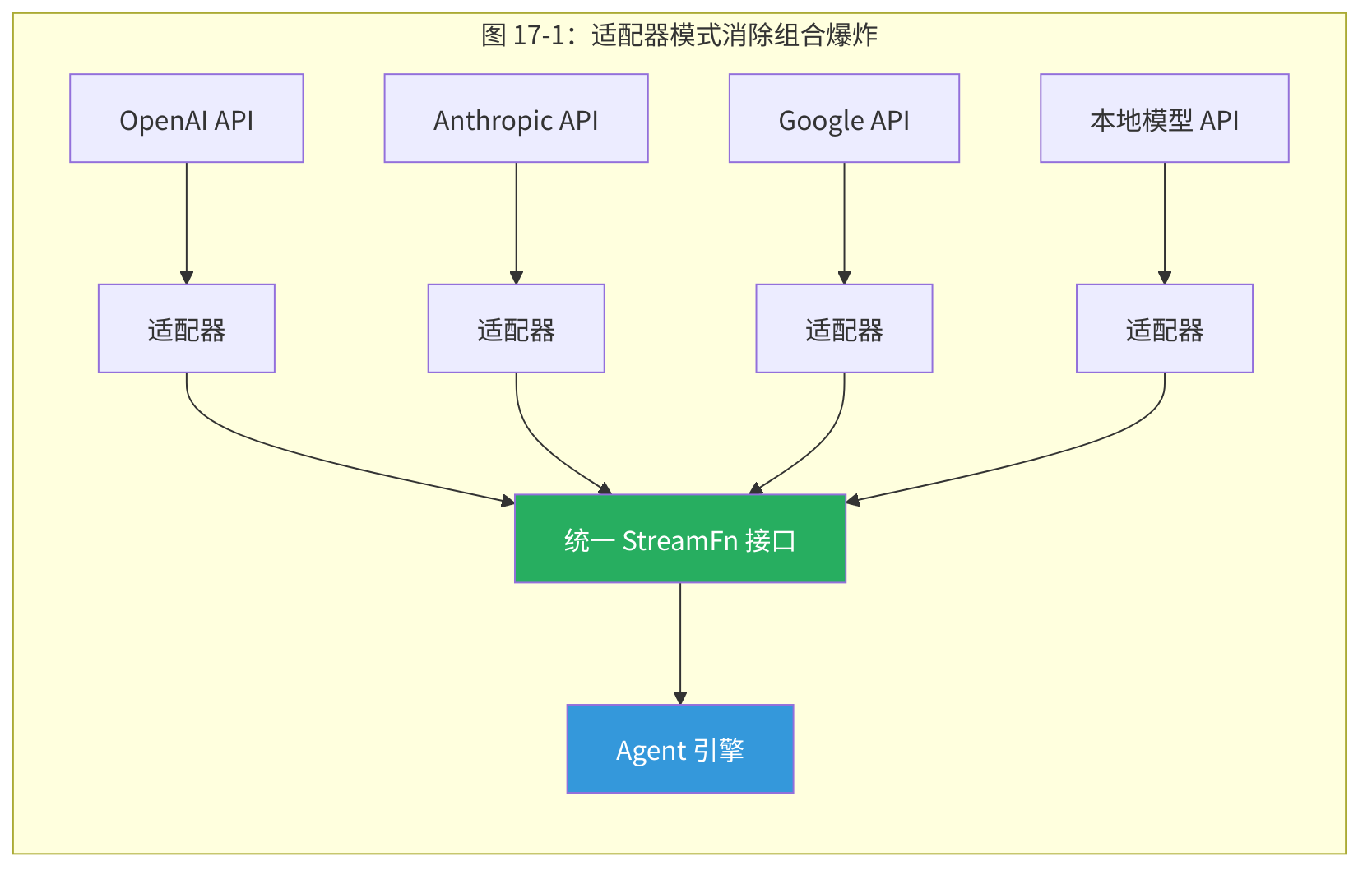
17.2.2 OpenClaw 的适配器实现
提供商适配器(src/providers/)是最典型的案例。OpenClaw 不使用传统的类层次结构(如 LangChain 的 ChatOpenAI extends BaseChatModel),而是采用函数式适配:
typescript
// 每个提供商只需实现一个 StreamFn 函数
type StreamFn = (params: {
messages: Message[];
tools?: ToolDef[];
model: string;
// ...
}) => AsyncGenerator<StreamEvent>;每个提供商的适配器将特定 API 包装在这个统一的函数签名后。添加新提供商只需实现一个函数——不需要理解类继承层次,不需要处理虚函数覆盖的微妙语义。
为什么选择函数而非类? 三个原因:
- 单方法接口不需要类。一个只有一个方法的类本质上就是一个函数。类增加了样板代码(构造函数、属性)但没有增加表达力。
- 避免继承的"脆弱基类"问题。类层次结构中,基类的任何修改都可能破坏所有子类。函数签名的合约更简洁、更稳定。
- 更容易测试。测试一个函数只需要提供输入和验证输出。测试一个类需要考虑状态、生命周期和方法调用顺序。
⚠️ 注意:函数式适配器模式在单方法接口场景下优于类继承,但在需要共享状态(如连接池、缓存)的场景下,闭包可能导致状态管理不够直观。OpenClaw 在需要共享状态的适配器中使用工厂函数返回闭包,而非类实例——这是一个有意的权衡,优先保证接口的简洁性。
17.2.3 工具格式适配
工具适配器展示了适配器模式的另一个变体——运行时鸭子类型:
typescript
// 不是检查版本号,而是检查实际能力
if ('input_schema' in toolDef) {
// Anthropic 格式
} else if ('parameters' in toolDef) {
// OpenAI 格式
} else if ('inputSchema' in toolDef) {
// 旧版格式
}这比基于版本号的分支更健壮——版本号可能报告有误,但实际的数据结构不会撒谎。这是"鸭子类型"的经典应用:不关心它声称是什么,只关心它实际是什么。
17.2.4 与 LangChain 对比
LangChain 使用完整的适配器类层次结构:
python
class BaseChatModel(ABC):
@abstractmethod
async def _agenerate(self, messages, **kwargs): ...
class ChatOpenAI(BaseChatModel):
async def _agenerate(self, messages, **kwargs): ...
class ChatAnthropic(BaseChatModel):
async def _agenerate(self, messages, **kwargs): ...这种方法的优势是类型安全性更强,IDE 支持更好。但代价是:每个新提供商需要创建一个类文件,继承基类,处理所有抽象方法。OpenClaw 的函数式方法将这个成本降到最低——一个函数,一个文件。
17.3 中间件管线模式
17.3.1 问题的反复出现
"多个独立的处理阶段需要按顺序应用到数据上"——这个问题在 OpenClaw 中至少出现了四次:
- 工具策略管线(第10章):七个独立的过滤阶段决定工具可用性。
- 插件钩子系统:三种交互模式(通知、转换、短路)的处理器链。
- 消息预处理管线:消息进入 Agent 前的翻译、脱敏、格式化。
- 安全审计管线:多个独立的安全检查按顺序执行。
17.3.2 管线的设计变体
不同的管线场景需要不同的管线语义:
线性管线(Linear Pipeline):每个阶段处理数据后传递给下一个。没有跳过、没有回退。工具策略管线使用这种语义——每个策略阶段独立过滤,结果传递给下一个阶段。
text
数据 → [阶段1] → [阶段2] → [阶段3] → 结果短路管线(Short-circuit Pipeline):某个阶段可以提前终止管线并返回结果。自动回复钩子使用这种语义——第一个匹配的规则直接响应。
text
数据 → [阶段1: 不匹配] → [阶段2: 匹配!返回] → [阶段3: 不执行]分叉管线(Fork Pipeline):数据复制到多个并行阶段。通知钩子使用这种语义——所有处理器都执行,互不影响。
text
┌→ [处理器A]
数据 → ├→ [处理器B]
└→ [处理器C]为什么不统一成一种? 因为不同的语义对性能、正确性和可调试性有不同的影响。线性管线最容易理解和调试(数据流线性、可预测),但不支持提前返回。短路管线支持优化(避免不必要的处理),但调试时需要理解"为什么后面的阶段没执行"。分叉管线最灵活但最难管理副作用。
17.3.3 管线 vs. 观察者模式
一个常见的替代方案是观察者模式(事件发布-订阅)。为什么 OpenClaw 选择管线而非观察者?
| 维度 | 管线 | 观察者 |
|---|---|---|
| 执行顺序 | 确定性的 | 不确定的 |
| 数据流向 | 线性、可追踪 | 扇出、难追踪 |
| 调试难度 | 低(从头到尾跟踪) | 高(谁处理了这个事件?) |
| 安全审计 | 容易(记录管线每步) | 困难(观察者可能在任何地方) |
对于安全敏感的操作(如工具策略),确定性执行顺序是必需的——"后面的策略覆盖前面的"这个语义要求严格的执行顺序。观察者模式的不确定顺序会使策略组合不可预测。
17.4 分层覆盖模式
17.4.1 一个反复出现的非 GoF 模式
这不是经典 GoF(Gang of Four)设计模式,但在 OpenClaw 中反复出现的频率足以将其命名:
分层覆盖(Layered Override):多个来源提供相同类型的配置,高优先级来源覆盖低优先级。
出现场景:
- 技能系统:6 级优先级(extra → bundled → managed → personal → project → workspace)
- 模型配置:静态定义 → 自动发现 → 配置文件 → 环境变量 → 逐 Agent 配置
- 工具策略:配置文件 → 全局 → Agent → 群组